1.Dockerfile
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
|
FROM ubuntu:20.04
# 设置时区及非交互式模式
ENV DEBIAN_FRONTEND=noninteractive
RUN ln -fs /usr/share/zoneinfo/Asia/Beijing /etc/localtime && DEBIAN_FRONTEND=noninteractive
# 解决ubuntu官方apt源无法访问的问题,注意选用合适的架构
COPY sources.list /etc/apt/
# 安装基本依赖
RUN apt-get update && apt-get install -y \
build-essential \
cmake \
git \
valgrind \
libssl-dev \
iputils-ping \
curl \
gnupg2 \
lsb-release
# 更新apt并安装必要的工具:curl, gnupg2,lsb-release
# 安装 libcurl 和 rapidjson
RUN apt-get install -y \
libcurl4-gnutls-dev \
rapidjson-dev
# 下载并编译安装 cJSON 库
RUN cd /tmp \
#&& git clone https://github.com/DaveGamble/cJSON.git \
&& git clone https://gitee.com/mirrors/cJSON.git \
&& cd cJSON \
&& mkdir build \
&& cd build \
&& cmake .. \
&& make \
&& make install \
&& rm -rf /tmp/cJSON
# 添加ROS2软件源
RUN curl -sSL https://gitee.com/ohhuo/rosdistro/raw/master/ros.key | apt-key add -
RUN sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
# 更新apt,并安装ROS2
RUN apt-get update && apt-get install -y \
ros-foxy-desktop
# 安装一些常用工具
RUN apt-get install -y \
python3-pip
# 设置环境变量
ENV ROS_DISTRO foxy
# 设置工作目录
WORKDIR /root/ros2_ws
# 安装软件包
RUN apt update && apt install -y \
python3-pip \
python3-vcstool
# 安装colcon
RUN python3 -m pip install -U colcon-common-extensions
# 设置ROS环境
RUN echo "source /opt/ros/foxy/setup.bash" >> /root/.bashrc
# 初始化ROS 2工作空间并构建
RUN /bin/bash -c "source /opt/ros/foxy/setup.bash; cd /root/ros2_ws; colcon build"
# 验证ROS 2是否安装成功
CMD ["bash"]
|
2.sources.list
1
2
3
4
5
|
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
|
3.制作镜像
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
|
ksnowlv@MacBook-Pro-3 RosProjects % docker build -t ros2_sdk:1.0 .
[+] Building 897.6s (20/20) FINISHED docker:desktop-linux
=> [internal] load .dockerignore 0.0s
=> => transferring context: 2B 0.0s
=> [internal] load build definition from Dockerfile 0.0s
=> => transferring dockerfile: 2.59kB 0.0s
=> [internal] load metadata for docker.io/library/ubuntu:20.04 15.4s
=> CACHED [ 1/15] FROM docker.io/library/ubuntu:20.04@sha256:626ffe58f6e7566e00254b638eb7e0f3b11d4da9675088f4781a50ae288f3322 0.0s
=> [internal] load build context 0.0s
=> => transferring context: 481B 0.0s
=> [ 2/15] RUN ln -fs /usr/share/zoneinfo/Asia/Beijing /etc/localtime && DEBIAN_FRONTEND=noninteractive 0.3s
=> [ 3/15] COPY sources.list /etc/apt/ 0.0s
=> [ 4/15] RUN apt-get update && apt-get install -y build-essential cmake git valgrind libssl-dev iputils-ping curl gnupg2 lsb-rel 142.3s
=> [ 5/15] RUN apt-get install -y libcurl4-gnutls-dev rapidjson-dev 2.8s
=> [ 6/15] RUN cd /tmp && git clone https://gitee.com/mirrors/cJSON.git && cd cJSON && mkdir build && cd build && cmake .. && make && make 10.0s
=> [ 7/15] RUN curl -sSL https://gitee.com/ohhuo/rosdistro/raw/master/ros.key | apt-key add - 0.7s
=> [ 8/15] RUN sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.l 0.4s
=> [ 9/15] RUN apt-get update && apt-get install -y ros-foxy-desktop 559.1s
=> [10/15] RUN apt-get install -y python3-pip 4.8s
=> [11/15] WORKDIR /root/ros2_ws 0.0s
=> [12/15] RUN apt update && apt install -y python3-pip python3-vcstool 6.9s
=> [13/15] RUN python3 -m pip install -U colcon-common-extensions 124.5s
=> [14/15] RUN echo "source /opt/ros/foxy/setup.bash" >> /root/.bashrc 0.8s
=> [15/15] RUN /bin/bash -c "source /opt/ros/foxy/setup.bash; cd /root/ros2_ws; colcon build" 1.1s
=> exporting to image 28.2s
=> => exporting layers 28.1s
=> => writing image sha256:38d6552607833a391dadf67ae55fac8a412e76452b6c532b545591126a8b9073 0.0s
=> => naming to docker.io/library/ros2_sdk:1.0 0.0s
View build details: docker-desktop://dashboard/build/desktop-linux/desktop-linux/s1hii2q5h6m5pfjvp5o6f1wqp
What's Next?
View a summary of image vulnerabilities and recommendations → docker scout quickview
ksnowlv@MacBook-Pro-3 RosProjects %
|
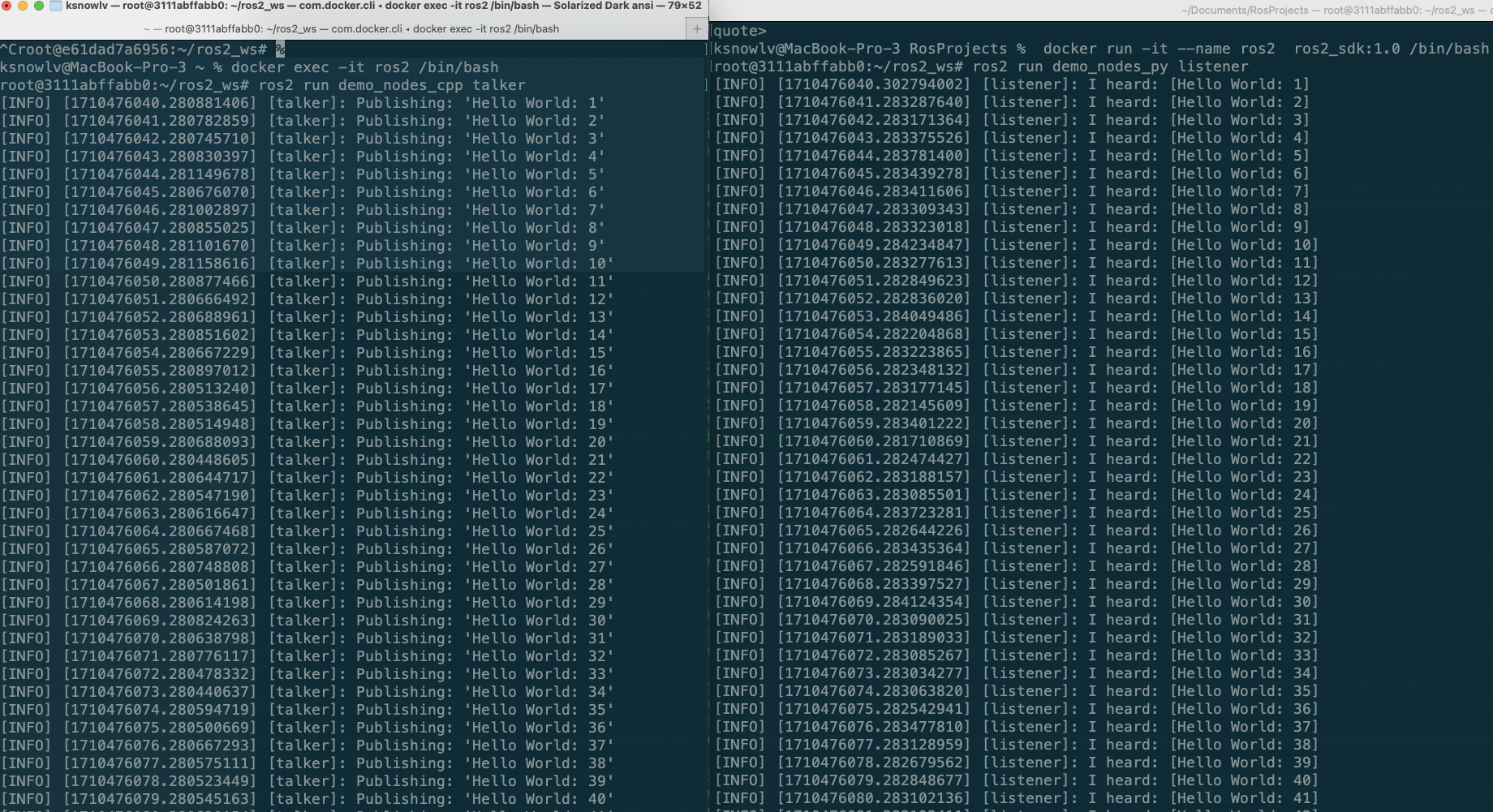
4.启动容器并开启ROS2 Python listener
1
2
|
ksnowlv@MacBook-Pro-3 RosProjects % docker run -it --name ros2 ros2_sdk:1.0 /bin/bash
root@3111abffabb0:~/ros2_ws# ros2 run demo_nodes_py listener
|
5.进入容器并开启ROS2 C++ talker
打开另外一个终端,通过docker exec -it ros2 /bin/bash进入容器内部,启动 C++ talker
1
2
3
4
5
6
7
8
9
10
11
12
|
ksnowlv@MacBook-Pro-3 ~ % docker exec -it ros2 /bin/bash
root@3111abffabb0:~/ros2_ws# ros2 run demo_nodes_cpp talker
[INFO] [1710476040.280881406] [talker]: Publishing: 'Hello World: 1'
[INFO] [1710476041.280782859] [talker]: Publishing: 'Hello World: 2'
[INFO] [1710476042.280745710] [talker]: Publishing: 'Hello World: 3'
[INFO] [1710476043.280830397] [talker]: Publishing: 'Hello World: 4'
[INFO] [1710476044.281149678] [talker]: Publishing: 'Hello World: 5'
[INFO] [1710476045.280676070] [talker]: Publishing: 'Hello World: 6'
[INFO] [1710476046.281002897] [talker]: Publishing: 'Hello World: 7'
[INFO] [1710476047.280855025] [talker]: Publishing: 'Hello World: 8'
[INFO] [1710476048.281101670] [talker]: Publishing: 'Hello World: 9'
[INFO] [1710476049.281158616] [talker]: Publishing: 'Hello World: 10'
|
6.效果
文章作者
梵梵爸
上次更新
2024-03-15
许可协议
原创文章,如需转载请注明文章作者和出处。谢谢