1.安装VSCode
2.VSCode中安装docker插件
在VSCode扩展中找到docker插件,并安装重启。
3.启动ROS2容器服务
在前文中ROS2容器服务启动容器服务
4.VSCode打开容器服务
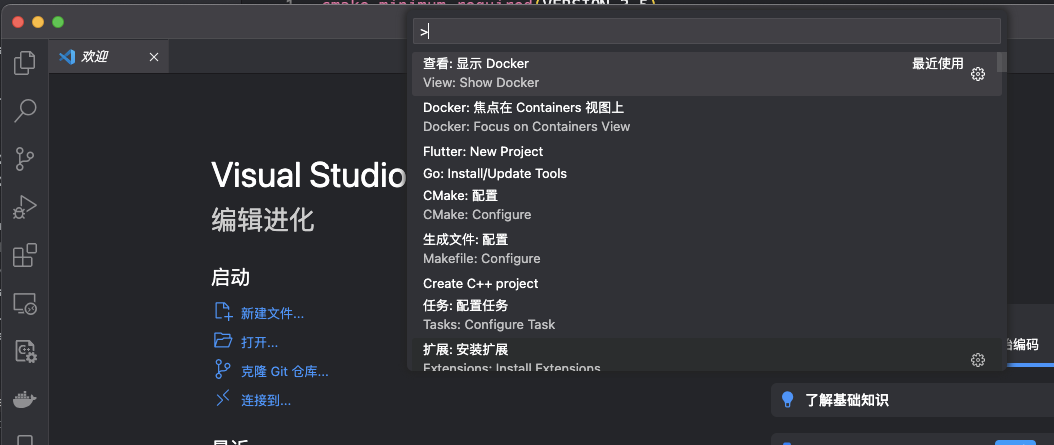
Command+Shift+P(或者Ctrl+Shift+P)打开命令面板,选择 “Dokcer”,
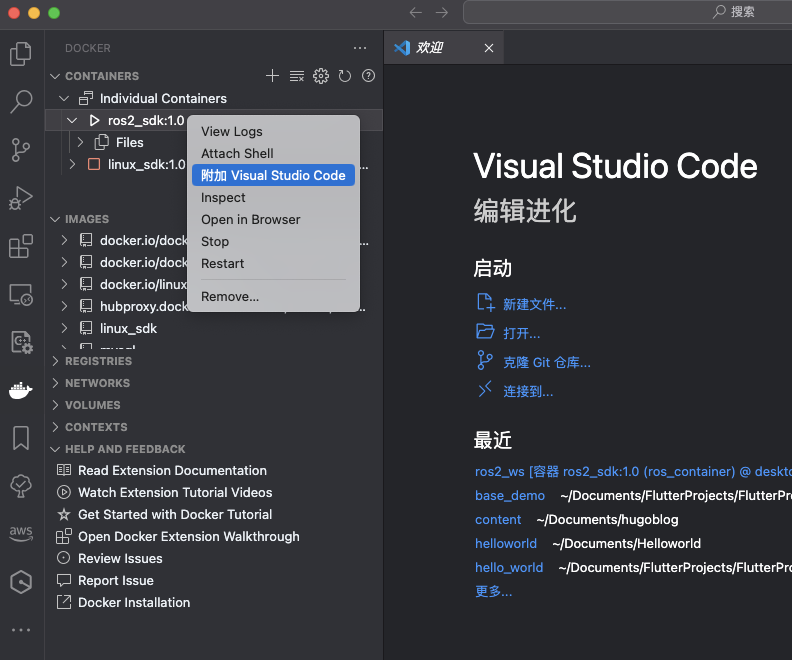 然后选择ros2_sdk:1.0容器,附加到Visual Studio Code 打开容器。
然后选择ros2_sdk:1.0容器,附加到Visual Studio Code 打开容器。
5.测试ros2容器服务
打开终端,开启ROS2 Python listener
1
2
3
4
5
6
7
8
|
root@acf5b27d6036:~/ros2_ws# ros2 run demo_nodes_py listener
[INFO] [1710589373.953308780] [listener]: I heard: [Hello World: 1]
[INFO] [1710589374.931733296] [listener]: I heard: [Hello World: 2]
[INFO] [1710589375.931589398] [listener]: I heard: [Hello World: 3]
[INFO] [1710589376.931793177] [listener]: I heard: [Hello World: 4]
[INFO] [1710589377.934030979] [listener]: I heard: [Hello World: 5]
[INFO] [1710589378.931360876] [listener]: I heard: [Hello World: 6]
[INFO] [1710589379.931520993] [listener]: I heard: [Hello World: 7]
|
打开另一终端,开启ROS2 C++ talker.
1
2
3
4
5
6
7
8
|
root@acf5b27d6036:~/ros2_ws# ros2 run demo_nodes_cpp talker
[INFO] [1710589373.930197135] [talker]: Publishing: 'Hello World: 1'
[INFO] [1710589374.930331507] [talker]: Publishing: 'Hello World: 2'
[INFO] [1710589375.930224145] [talker]: Publishing: 'Hello World: 3'
[INFO] [1710589376.930231354] [talker]: Publishing: 'Hello World: 4'
[INFO] [1710589377.930409419] [talker]: Publishing: 'Hello World: 5'
[INFO] [1710589378.930200203] [talker]: Publishing: 'Hello World: 6'
[INFO] [1710589379.930267633] [talker]: Publishing: 'Hello World: 7'
|
文章作者
梵梵爸
上次更新
2024-03-16
许可协议
原创文章,如需转载请注明文章作者和出处。谢谢